Robots for Distant Musicians
- Categories Electronics, Installation, Performance
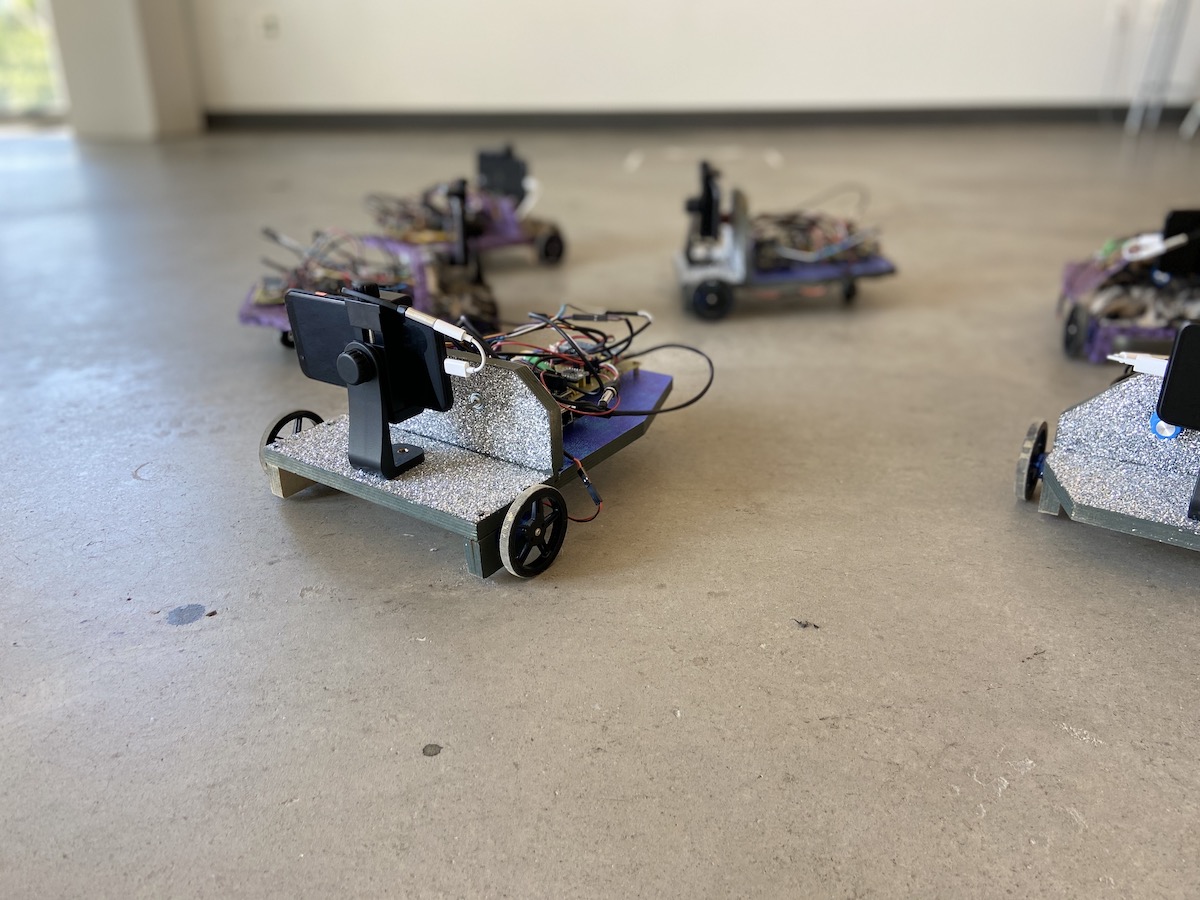
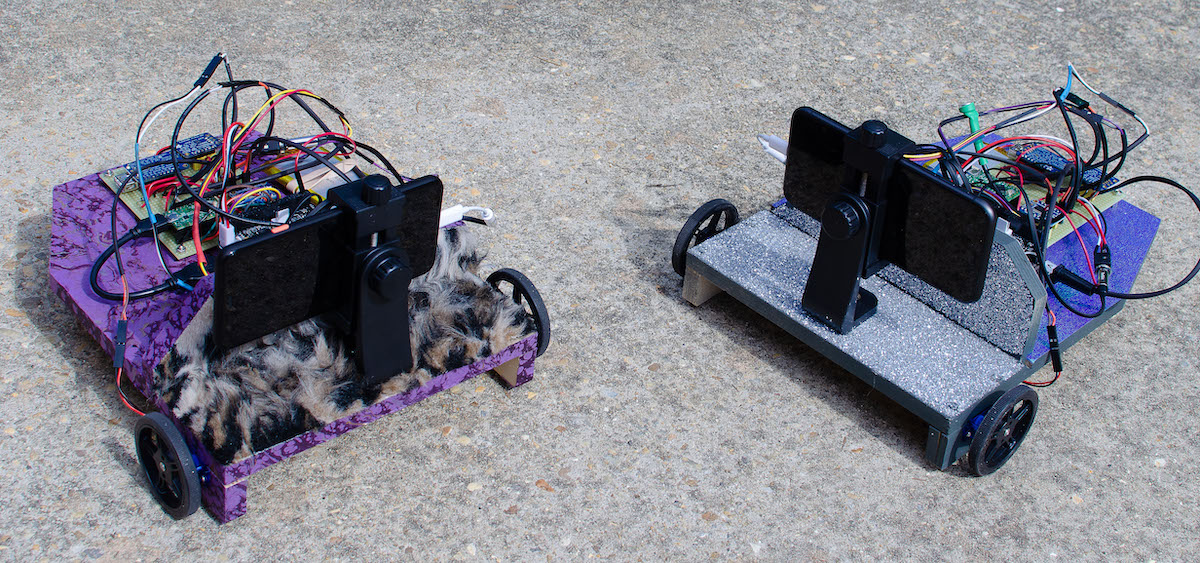
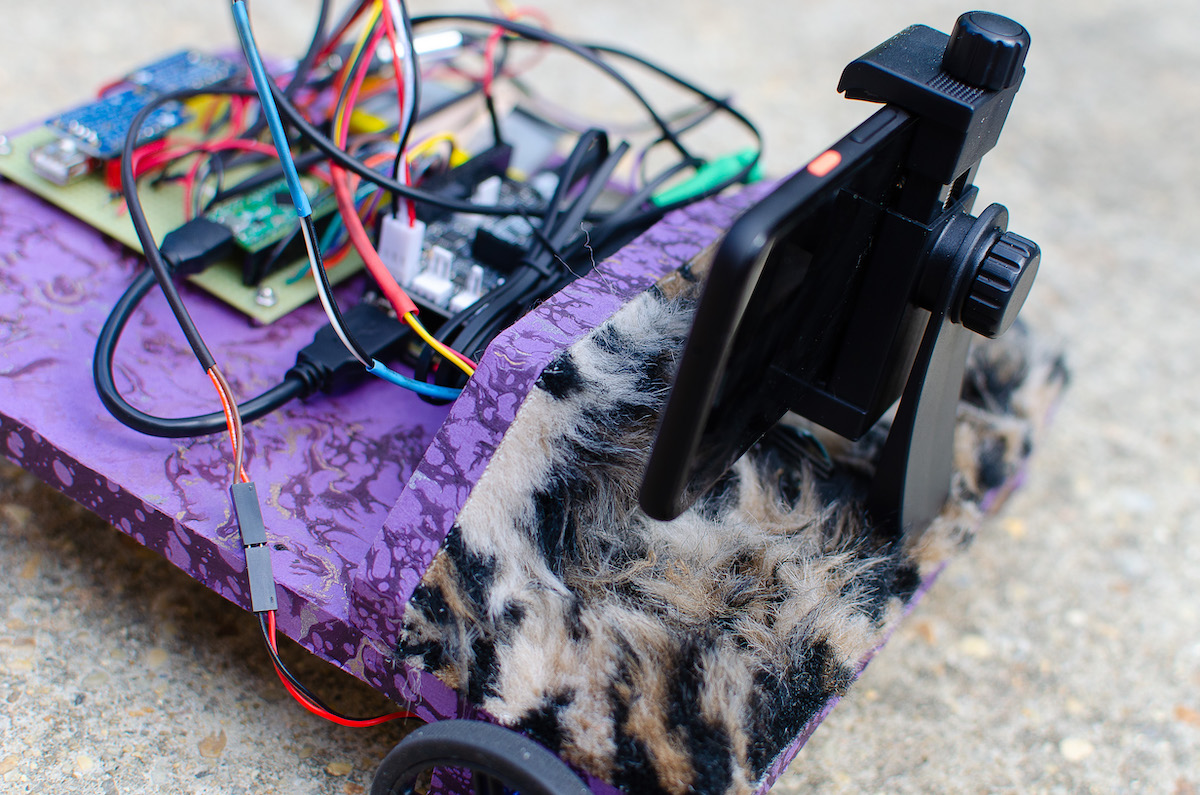
As the capstone project for my position as Game Designer in Residence at the MICA Game Lab, I developed a set of musically responsive robots that could be controlled by anyone in the world in real time. I called this project Robots for Distant Musicians.
The robots use pitch detection to control their movements – different musical pitches will make them move in different ways. This very basic system forms the basis for a wide variety of interactions, from gameplay to freeform exploration, with the added twist that they can be connected to the internet to be controlled live through existing communication platforms like Discord or Zoom.
More information can be found on the Game Lab project page.


The code and technical information for the project is all available on GitHub.